本事例のトピック
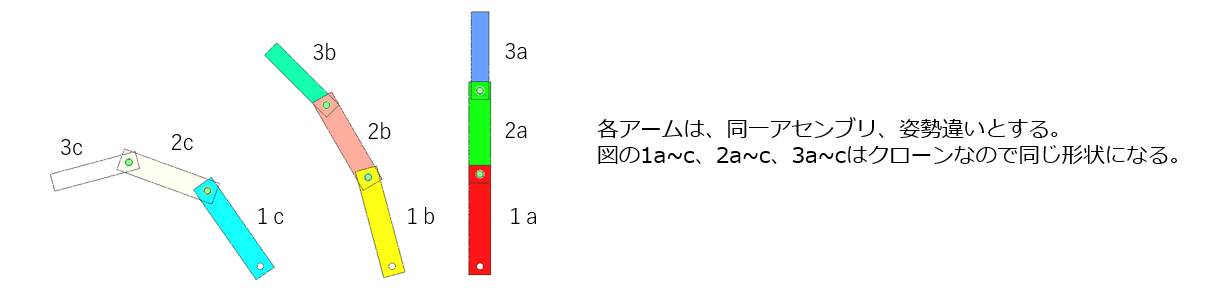
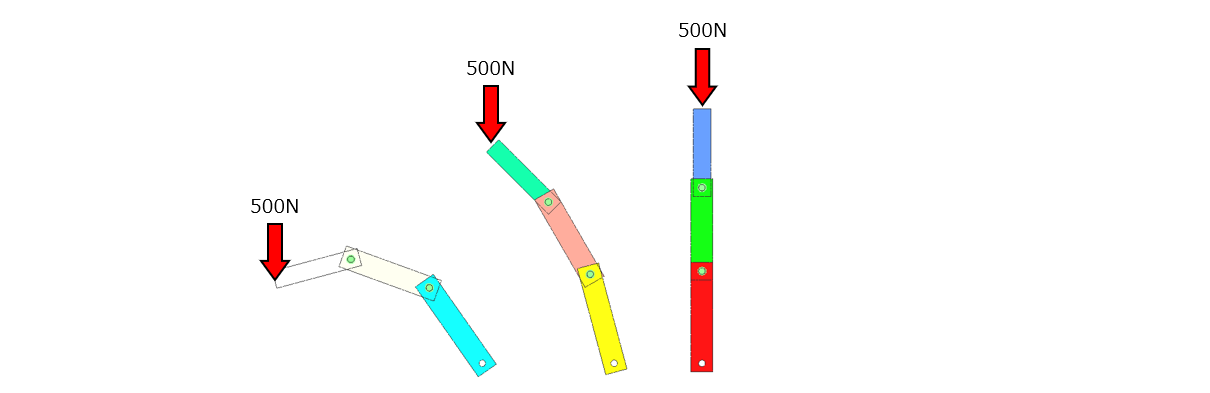
- 可動部を持つアセンブリ構造品において、姿勢違いによって発生する荷重条件の変化を再現し、同一形状の部品として同時にトポロジー最適化を行う「クローン制約」の有効性を検証。
- 連続する類似パターンの構造体や回転・平面対称の部品に対して、スケール指定やパターン化を適用することで、モデリング工数を大幅に削減しつつ一貫性のある設計を導出。
- クローン制約を適用しない個別の最適化とは異なり、アセンブリ全体での固有値要求や風荷重といった必須条件を同時に考慮した、実用的な最適化プロセスの確立を実証。
設計者・エンジニア必読の特設コンテンツ
CAE最適化設計・完全ガイド:高価なツールを「宝の持ち腐れ」にしない!
現場を崩壊させる「手戻り地獄」から抜け出すには?F1から量産車まで、20年以上の知見を誇るGRMが「CAE主導開発」の極意を徹底解説。
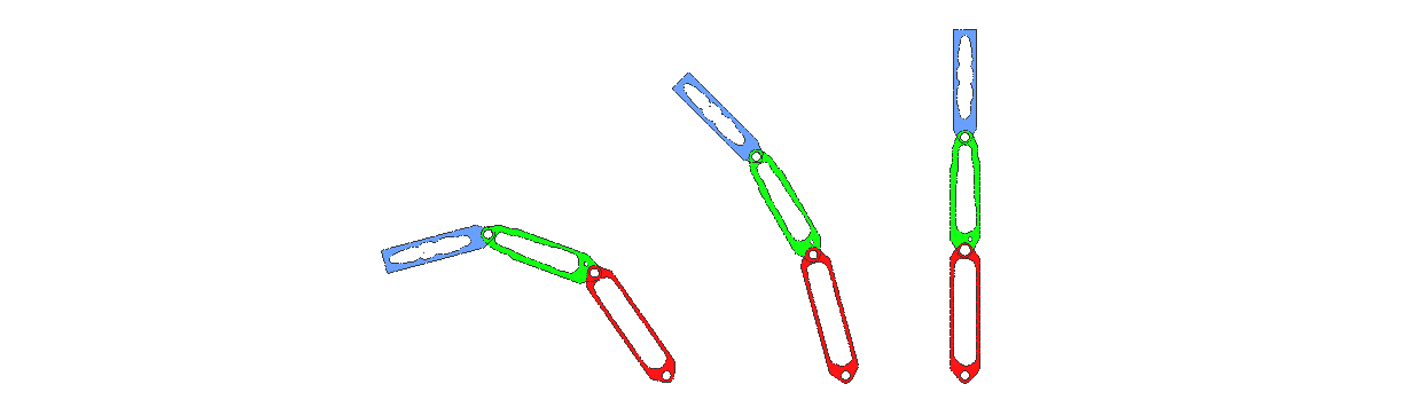
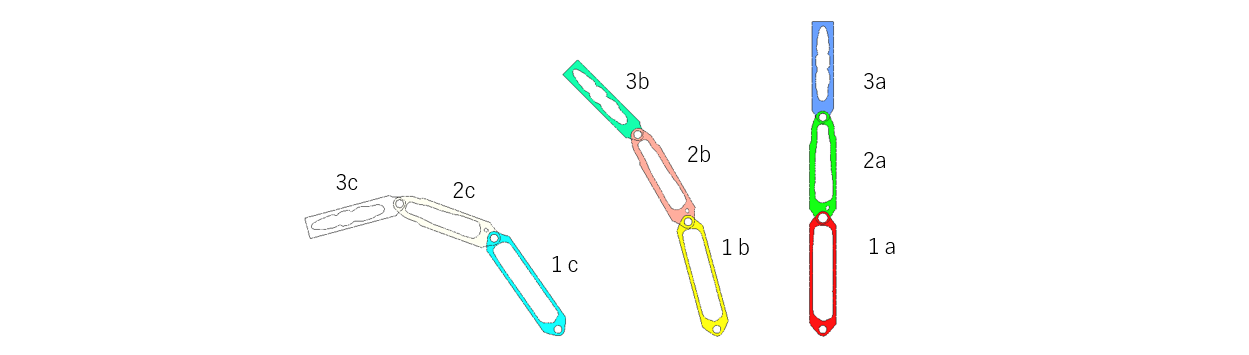
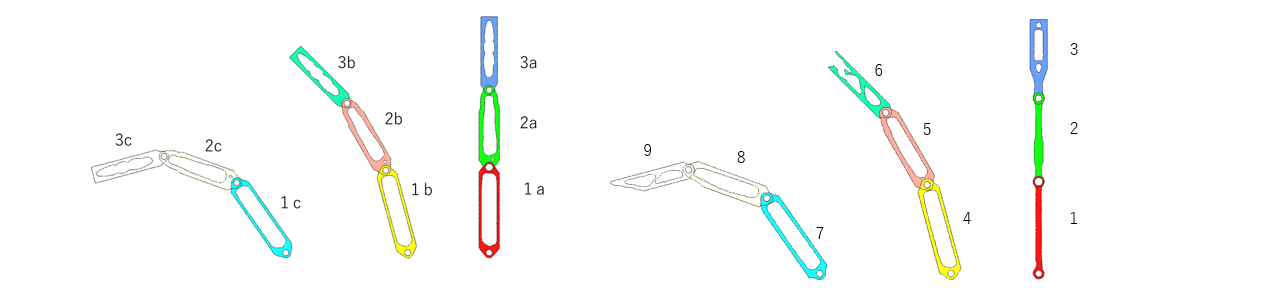
上記がクローニング制約の概念です。以下のような状況で使用できる便利な制約条件です。
- 可動部を持ったアセンブリ構造品で、姿勢違いが発生する
- 連続したパターンの構造体
- 対称形状の部品がある(回転、平面対称)
1.は具体的に、
ロボットアーム・ショベルカーやクレーンのブーム(アーム)・サスペンションアームなどの、関節がある製品です。製品が可動することで、姿勢によって受ける荷重が変わってしまう場合に有効です。
2.は具体的に、
橋梁の柱など、大きさが少しずつ違う類似形状がパターンとして並ぶ構造体です。クローニング制約ではスケール指定ができるので、大きさ違いも問題ありません。
3.は具体的に、
構造体の構成部品にある共通/対称形状のブラケット等です。別事例でのホイールでは、スポークをパターン化するためにクローニング制約を使用しています。
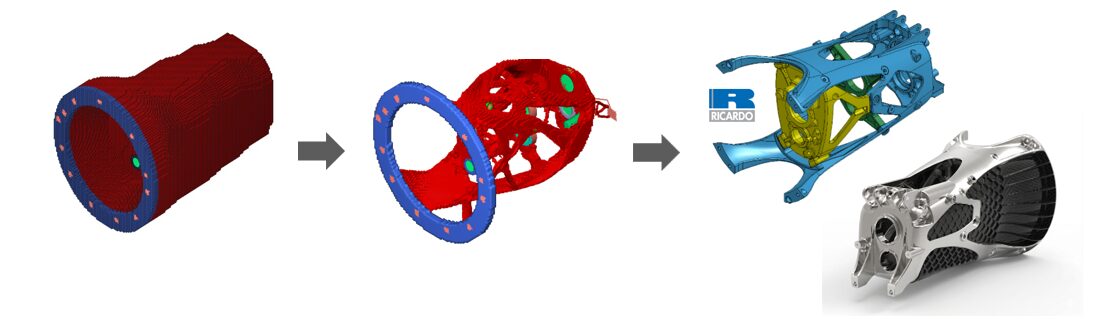
さらに製品形状に近づけた事例はロボットアームのトポロジー最適化をぜひご覧ください。
設計者・エンジニア必読の特設コンテンツ
CAD/CAE分業の手戻りを解消する「シミュレーション主導設計」実践ガイド
「終わらない手戻り」や「実機と合わないCAE」に疲弊していませんか?最適化アルゴリズムを駆使し、極限の軽量化と工数削減を達成するGRMのアプローチと9つの実践事例を公開!
その解析課題、GRMが解決します。
本記事でご紹介したトポロジー最適化技術の応用」や「設計時間短縮ツールを、御社の製品開発に適用しませんか?
「現状のモデルを見てほしい」「テスト解析を依頼したい」など、技術的なご相談からでも大歓迎です。
※「記事を見た」と書いていただけるとスムーズです。
※技術のご相談は各事例モデルの解析担当者に対応させます。
この記事の監修・執筆チーム
GRM Consulting株式会社 解析エンジニアリング部
モータースポーツ最高峰のF1から量産車開発まで、20年以上にわたり構造設計・衝突・振動・流体解析に携わるスペシャリスト集団。 単なるシミュレーション結果の提示に留まらず、本記事のようなCAE最適化設計を活かした設計を得意とし、製造要件(鋳造・鍛造・押出成形・板金・CFRP)を考慮した「造れる設計」を提案しています。
- 主要ツール:LS-DYNA, Abaqus, Genesis, Nastran, OptiAssist, Simcenter 3D
- 専門領域:構造最適化、衝撃エネルギー吸収体最適化、CFRP複合材解析、衝突解析、CFD解析