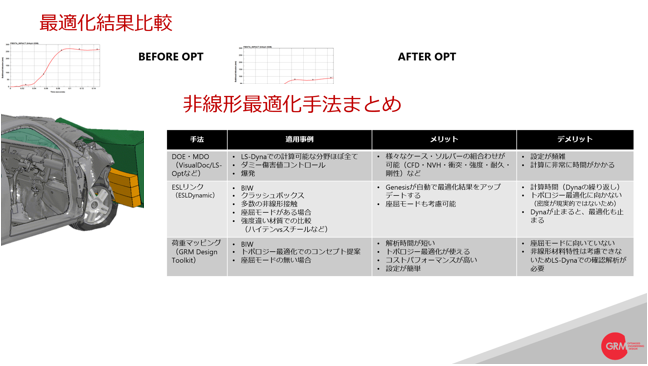
本記事のトピック
- Explicit(動的)解析へのアプローチ:LS-TaSCにおいて、低密度要素の爆発エラーを回避するためSIMP法を除外し、True Mechanics法(2種のアルゴリズム)での最適化を検証しました。
- 衝撃吸収を考慮した形状変化:Implicit(静的)解析と比較し、圧子との接触部分の肉厚が厚く残るなど、動的衝撃に耐えうる現実的な構造が出力されることを確認しました。
- アルゴリズム依存性の可視化:与えるエネルギー量や選択するアルゴリズムによって、出力される最適化形状が全く異なる結果になるという興味深い特性を提示しています。
別の事例紹介でLS-TaSCをImplict解析で使用したトポロジー最適化を紹介しました。
今回は、Explicit解析を使用してみました。普段あまり使用しないため、いくつかの設定から形になったものをご紹介します。
モデルは前回同様に以下のモデルを使用します。
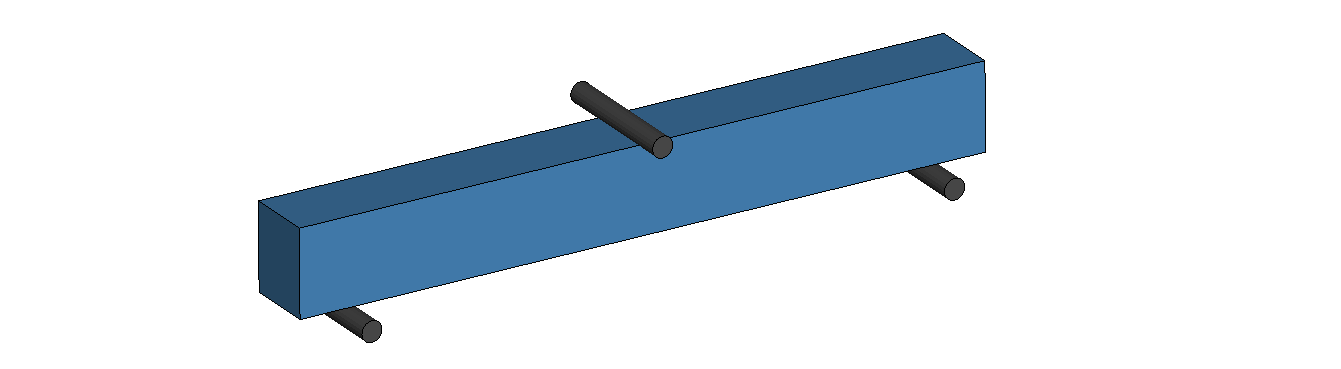
圧子に初速度を与え、梁に衝突させます。バンパーレインフォースやサイドシルに衝突するポールのようなイメージです。
今回は2つのアルゴリズムを使用しました。
- True Mechanics, ProjectedSubGradient
- Ture mechanics, Optimality
なお、SIMP法はExplicit解析には適していないため今回は紹介しません。低い密度になった要素が爆発して解析エラーになるためです。
さて、結果を見てみましょう。
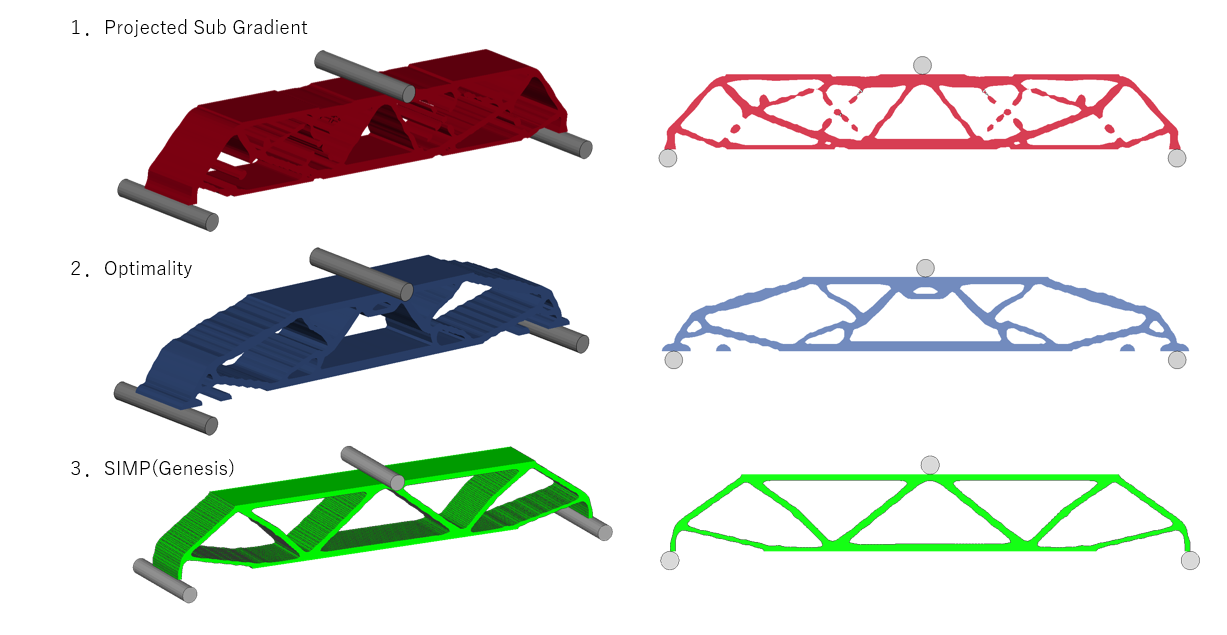
SIMP法かつImplicitソルバーで最適化した結果とは異なる結果となりました。両方の結果において収束が完ぺきではなく、微妙な形状が残ってしまいました。
①②両方の結果を見てわかるのは、圧子が接触する部分の肉厚がSIMPの結果と比較して厚いことです。接触時の衝撃を考慮した結果になっていることがわかります。
与えるエネルギー量によって大きく結果が変わると考えられますが、アルゴリズムの違いにより全く別の形状が出力させることが興味深いです。
弊社ではESL-DynaやRDM-Dynaを使用してLS-Dyna↔Genesisをリンクさせることで非線形/大変形領域のトポロジー最適化を実施していますが、LS-TaSCのベンチマークをさらに進めていきます。
また、Abaqusを用いたトポロジー最適化についてはOptiAssist for Abaqusのページをご確認ください。
設計者・エンジニア必読の特設コンテンツ
衝突・衝撃解析の実践ガイド:実機試験コストを低減するCAE評価と構造最適化
物理試験への依存から脱却!莫大な試作費用と手戻りを防ぎ、LS-DYNAによる高精度なバーチャル評価で極限の軽量化を実現するアプローチを徹底解説。
設計者・エンジニア必読の特設コンテンツ
CAE最適化設計・完全ガイド:高価なツールを「宝の持ち腐れ」にしない!
現場を崩壊させる「手戻り地獄」から抜け出すには?F1から量産車まで、20年以上の知見を誇るGRMが「CAE主導開発」の極意を徹底解説。
その解析課題、GRMが解決します。
本記事でご紹介した「非線形接触を考慮した最適化解析」や「正しい境界条件での最適化解析」を、御社の製品開発に適用しませんか?
「現状のモデルを見てほしい」「テスト解析を依頼したい」など、技術的なご相談からでも大歓迎です。
※「記事を見た」と書いていただけるとスムーズです。
※技術のご相談は各事例モデルの解析担当者に対応させます。
この記事の監修・執筆チーム
GRM Consulting株式会社 解析エンジニアリング部
モータースポーツ最高峰のF1から量産車開発まで、20年以上にわたり構造設計・衝突・振動・流体解析に携わるスペシャリスト集団。 単なるシミュレーション結果の提示に留まらず、本記事のようなCAE最適化設計を活かした設計を得意とし、製造要件(鋳造・鍛造・押出成形・板金・CFRP)を考慮した「造れる設計」を提案しています。
- 主要ツール:LS-DYNA, Abaqus, Genesis, Nastran, OptiAssist, Simcenter 3D
- 専門領域:構造最適化、衝撃エネルギー吸収体最適化、CFRP複合材解析、衝突解析、CFD解析