本記事の要点
- 搭載物重心の共振ピーク加速度を最小化する周波数応答最適化の手法を解説します。
- 最大応答値を効果的に制御する「β法(Min-Max問題)」を定式化し、外殻フェアリングとの動的クリアランスを同時に成立させるCAE設定手順を示します。
- 初期設計で確認された約38Gの最大加速度を、構造物の剛性・質量マトリクスの局所制御に伴う「固有モードの分散」および「異方向への連成化」によって抑制するメカニズムを考察します。
周波数応答解析および最適化が適用される工学的領域と課題
機械構造物や輸送機器の設計開発において、稼働時に発生する振動や外部からの動的荷重への対策は、構造健全性と性能を担保する上で極めて重要な要素です。従来の静的強度設計のみでは、時間とともに大きさと方向が変化する動的荷重に対して十分な評価を行うことができません。特に、外部からの入力周波数と構造物の固有振動数が一致した際に生じる共振現象は、構造物に過大な応力や加速度をもたらし、疲労破壊や機能不全を誘発する主要因となります。
このような動的環境下における構造性能を評価・改善するために用いられる手法が、周波数応答解析およびそれに基づく構造最適化設計です。本手法は、単に構造物の剛性を高めて固有振動数を変化させるだけでなく、動的な応答値そのものを直接制御できるため、以下の領域をはじめとした幅広い産業分野で活用されています。
技術コラム:周波数応答最適化が適用される例
-
自動車分野(NV低減・共振回避)
エンジンや路面からの入力周波数に対する振動伝播関数(NTF)のピークを低減し、室内騒音や微振動を抑制します。また、マウントブラケットやバッテリーフレーム等の動的応力を回避し、疲労寿命を向上させます。そのほか、トランスミッションやプロペラシャフト等の回転体にも有効です。 -
産業機械・回転体分野(稼働安定性の向上)
コンプレッサーやタービン等の定格回転数における危険速度(共振)を回避し、軸受けの過度な摩耗やシャフトの破損を防ぐため、ケーシング構造等の最適な質量・剛性配置を自動導出します。 -
精密機器・宇宙航空分野(動的クリアランスの確保)
ランダム振動や突発荷重下において、外殻構造と内部コンポーネントが近接・衝突するリスクを排除するため、最小限の重量増加で相対変位を制限し、適切な動的クリアランスを維持します。
本記事におけるアプローチ
本記事では、上記の振動問題をCAE主導で解決する具体的な手順を示すため、構造最適化ソルバー「GENESIS」のチュートリアルモデルを代表例として用います。このモデルは、民生用商用ロケットの先端部に搭載される搭載物の結合部を模した、動的応答課題を含む構成となっています。この簡略化されたモデルを通じて、荷重条件の設定から固有値の制御、およびβ法を用いた応答低減最適化のプロセスを紹介します。
周波数応答解析モデルの構成およびベースライン解析結果
有限要素モデル(FEM)の構成概要
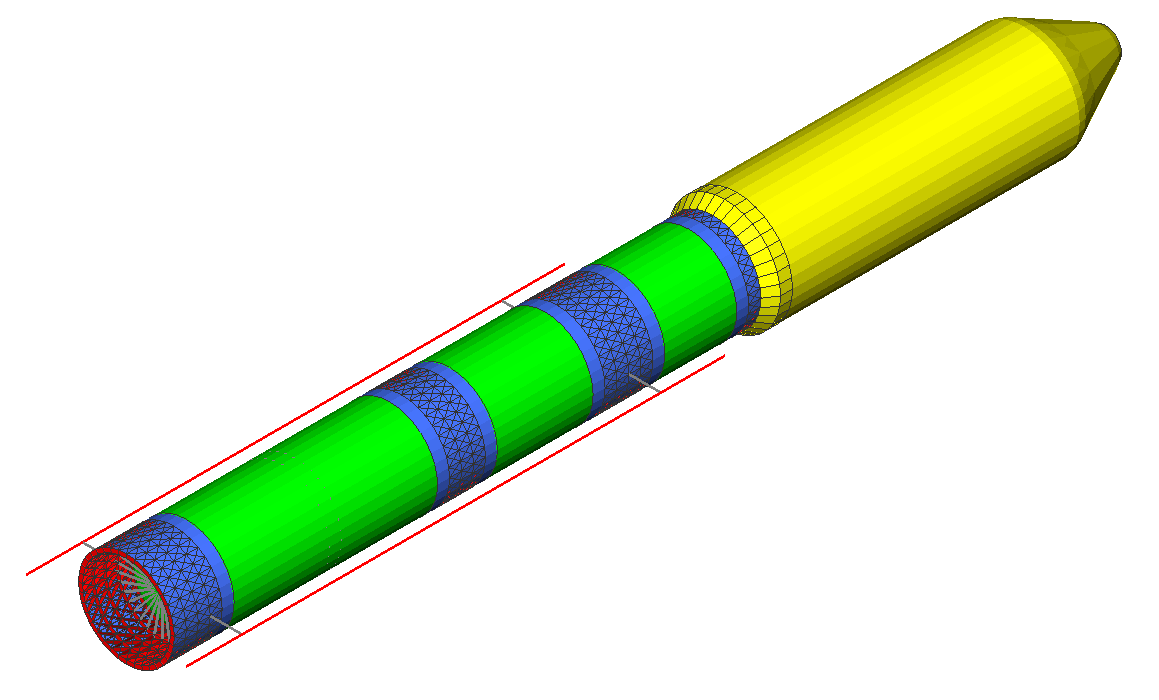
対象となる有限要素モデルは、打上げ機(Launch Vehicle: LV)の上部構造および搭載物格納部を模擬した構造形式で構成されています。モデル全体の構成は以下の通りです。
- 搭載物のモデル化
重心位置に任意の質点(MASS要素)を作成し、剛体要素でインターフェース部に接続。 - インターフェース部(結合部/支持部分):
最適化領域となる部分:- アダプターリング:SHELL要素
- トラス構造:BAR要素
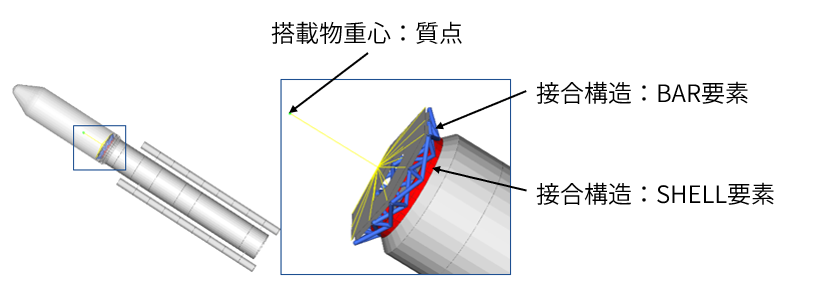
搭載物と支持構造を剛体要素で接合。支持構造は次のステップで最適化される部分。
解析条件および動的荷重条件の設定
このモデルでは、搭載物とフェアリングの動的クリアランスと、加速度を計算します。
| 設定項目 | 解析条件および設定概要 |
|---|---|
|
入力荷重 (横荷重パルス) |
フェアリングの一側面(-Z方向)に対して圧力を印加します。 |
| 固有値抽出条件 | Lanczos法。剛体モードは排除するように設定しています。 |
| 減衰条件 | 構造物全体の動的応答を現実的な範囲に制御するため、減衰を設定します。 |
|
評価指標① (加速度応答) |
搭載物重心におけるZ方向(このモデルの場合は半径方向)の動的加速度応答を評価項目として設定します。 |
|
評価指標② (動的クリアランス) |
構造物の変形時にフェアリングと搭載物の接触を回避するため、フェアリング内壁面と搭載物重心の相対変位を評価項目にします。 |
ベースライン(初期設計)解析結果
最適化を行う前の初期構造状態(サイクル0)における解析結果は以下の通りです。
構造物全体の横曲げモード。
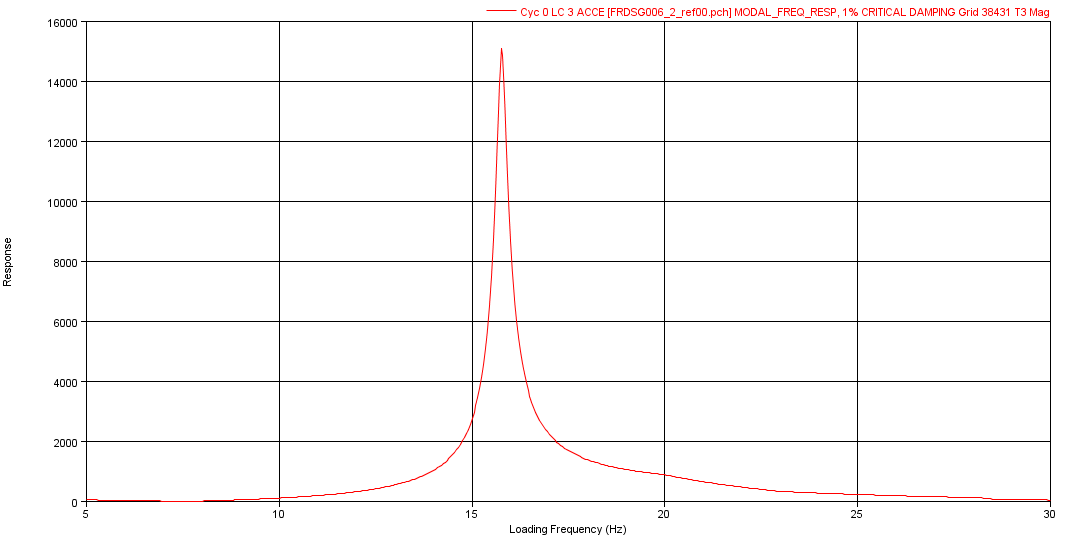
搭載物重心に設定したMASS要素の軸直行方向の加速度を応答として作成したグラフ。約16Hzに共振による極端なスパイクが確認できる。
| 評価項目 | 初期設計(ベースライン)での解析結果 |
|---|---|
| 固有モード特性 | 15.77 Hzにおいて構造全体の「Z方向への1次曲げモード」が存在することが確認されました。このモードは、構造物の先端に位置するフェアリングおよび搭載物が同位相で大きく屈曲する挙動を示します。 |
|
周波数応答結果: 加速度応答 |
周波数約16 Hz付近において共振現象が発生しました。この共振点において、搭載物重心におけるZ方向加速度は最大約38G(15,000 in/sec²)でした。 |
|
周波数応答結果: 動的クリアランス応答 |
共振周波数(約16 Hz)において、フェアリングと搭載物間の動的クリアランス(相対変位)のピーク値は0.55inc.でした。 |
初期設計において発生している横加速度は約38 Gでした。摂家目標である動的クリアランス1.0インチ以内に抑制しつつ、このピーク加速度を可能な限り低減させます 。
周波数応答問題における構造最適化の数理的定式化と設定
初期設計(ベースライン)において確認された約38Gに達する動的加速度応答を抑制するため、本章では構造最適化ソルバーを用いた周波数応答最適化の設定について解説します 。
β法を用いた最適化問題の数理的定式化
今回のモデルでは、目的関数と制約条件には、β法と呼ばれる方法を使用します。
技術解説:周波数応答最適化におけるβ法(Min-Max定式化)の数理的アプローチ
周波数応答解析に代表される動的応答の最適化において、評価対象となる物理量(加速度や変位など)は、周波数軸上に分布する複素ベクトル量(振幅と位相)としての特性を持ちます。構造の設計変数を変更すると、共振ピークが発生する周波数そのものが移動(シフト)するため、特定の周波数ステップのみを監視して最適化を行うと、反復計算の過程で感度の不連続性により収束性が著しく悪化する課題が生じます。
この数理的課題を解決するために用いられる手法が「β法(Min-Max問題の定式化)」です。β法では、全周波数における最大応答の上限を代表する、仮想の設計変数 β を作成し、この β 自体を最小化することを目的関数とします。
目的関数:
$$\text{Minimize} \quad \beta$$
制約条件1:搭載物重心の動的加速度に関する制約
$$\frac{\text{Dynamic Response}}{\text{Scale Factor}} – \beta \le 0.0$$
制約条件2:動的クリアランス(相対変位)に関する制約
$$\text{Dynamic DISP Response} \le 1.0 \text{ inch}$$
分母に定義される係数(Scale Factor)には、初期設計サイクルの最大応答値を定数として適用します。これにより、各反復サイクルにおける応答値が無次元化され、全帯域の応答曲線の最悪値(最大値)が常に β 以下に抑え込まれます。ソルバーはこの制約条件を満たしながら β を最小化するため、結果として特定の周波数ステップに依存することなく、全帯域の共振ピークを効果的に減少させる最適化が可能となります。
補足:ものすごく簡単に言い換えると、最適化中に共振ピーク周波数が移動(例:16Hz→20Hz)してしまうと、ピーク周波数が変化するだけの結果になる可能性があるため、β法で全周波数帯の応答を初期設計最大値よりも低下させる設定にした。ということです。
設計可能領域および設計変数の設定
動的応答を制御するための設計パラメータとして、打上げ機構造と搭載物を結合するインターフェース部の幾何学的寸法を設計可能領域に指定し、以下の変数を定義します 。
| 設計可能領域 | 設計変数および初期値の設定 |
|---|---|
|
設計可能領域①:搭載物アダプターリング (SHELL要素) |
|
|
設計可能領域②:トラス補強チューブ (BAR要素 / 円管) |
|
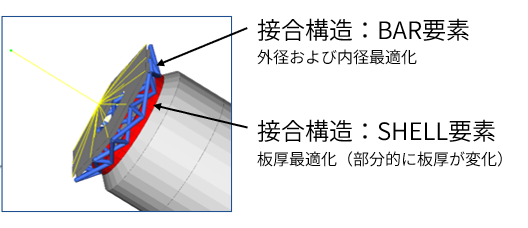
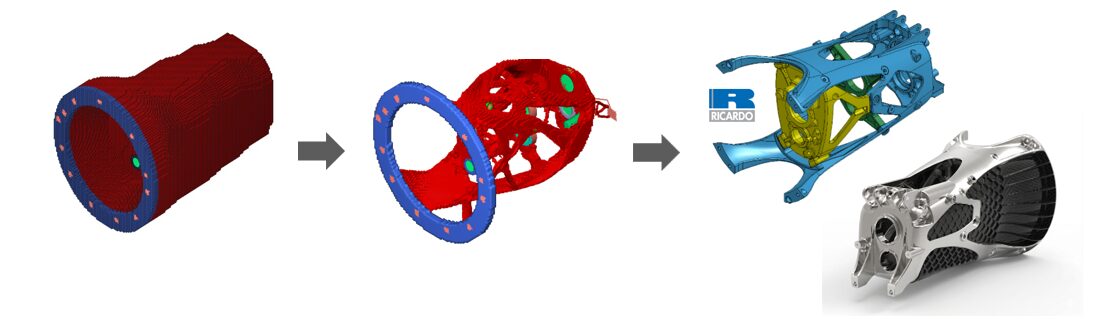
BAR要素部分はチューブの外径内径を調整し、SHELL部分はトポメトリー最適化により適切な板厚分布を調整する。
これらの独立した設計変数に対してトポメトリー最適化(Topometry Optimisation)を組み合わせることで、各要素位置における最適な材料寸法を導出させます。本設定により、重量増加を最小限に抑えつつ、動的クリアランス要件を満足し、かつ搭載物への加速度を低減する結合部構造設計が可能となります。
最適化結果
最適化にともなう固有モード特性の変化
最適化計算の進展に伴い、初期設計(サイクル0)において15.77 Hzに存在していた構造全体の固有モードは、波形および固有周波数の双方が大きく変化しました。初期のモードはZ方向へ純粋に屈曲する構造全体の曲げモードであり、これが横荷重パルスと同調して共振を引き起こしていました 。しかし、最適化後の最終デザインサイクル(サイクル43)においては、結合部の剛性および質量バランスが再配置された結果、元の単一モードが消失し、複雑な三次元的挙動を示す複数のモードへと変化しました。
全体が同一の変形モードではなく、三次元的な変形モードに変化している。
周波数応答解析結果の比較
最適化前後の搭載物重心における加速度応答の比較、および動的クリアランス(相対変位)の検証結果は以下の通りです。
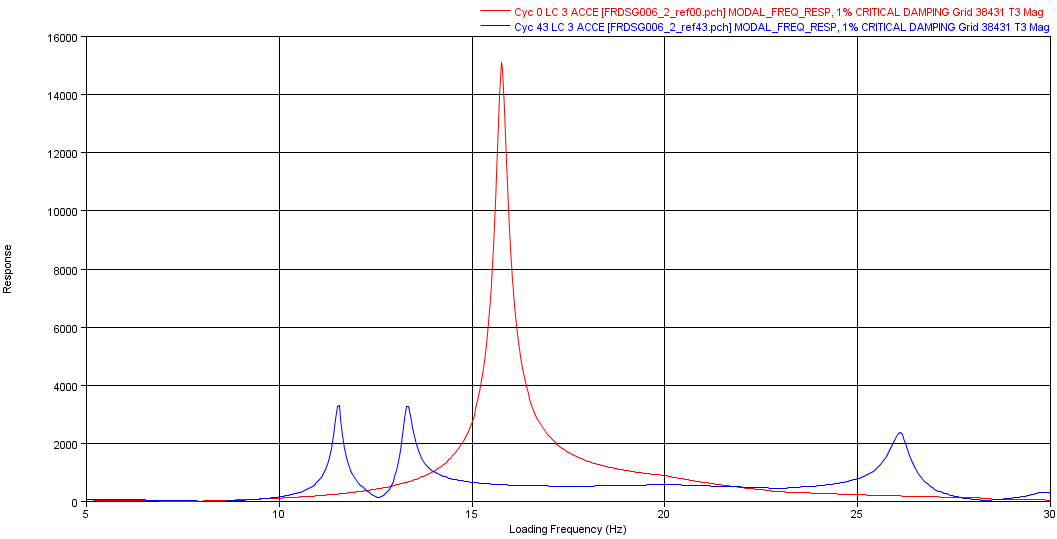
赤:最適化前、青:最適化後
15.77Hzのスパイクは解消され、11.5, 13.3, 26.1Hzにピークが見られる。いずれも元の応答に対して大きく低下している。
加速度応答の低減と挙動
初期設計において約16 Hzで発生していた約38 Gの加速度ピークは、最適化によって効果的に抑制されました。最終デザインサイクルでは、Z方向の最大加速度応答が複数の小さなピークへと分割(分散)され、特定の周波数での突出した共振現象が回避されています。
動的クリアランス(相対変位)の成立性
フェアリングと搭載物の干渉リスクを評価する相対変位においては、最適化の全プロセスにおいて設計許容値である1.0インチの制約条件を完全に遵守していることが確認されました。設計変更によって加速度を低減させつつも、必要な動的クリアランスを健全に維持することに成功しています。
モード分散と連成化による応答低減のメカニズム
本事例で紹介した動的応答低減の工学的メカニズムは、「固有モードの分散(分割)」および「異方向(複数方向)への連成化(結合)」として説明されます。
従来の振動対策では、部材を単純に肉厚化して剛性を高め、固有振動数を入力周波数帯域の外側へシフトさせる手法が一般的でした。
しかし、本事例のように入力される動荷重が広帯域な周波数成分を有している場合、固有振動数を多少変化(シフト)させるだけでは、移動先の周波数においても荷重のエネルギーと同期してしまうため、共振応答を完全に回避することは困難です。
構造最適化ソルバーは、構造物全体の剛性マトリクスと質量マトリクスを局所的に最適化しました。これにより、純粋な1次曲げモードが、3次元的な変形モード(連成モード)へと再構成されました。
エネルギーの観点から見ると、特定の方向に集中していた動的入力エネルギーが、連成化によって他方向の振動挙動へと分散・相殺され、結果として搭載物重心に作用する最大加速度を物理的に引き下げる効果を生み出しています。
このように、CAE主導の構造最適化は、人間の直感では困難な「モード形状そのものの動的制御」を自動的かつ論理的に実現する設計アプローチです。
その解析課題、GRMが解決します。
本記事でご紹介した「最適化を活かした製品設計」や「振動に関する最適化技術」を、御社の製品開発に適用しませんか?
「現状のモデルを見てほしい」「テスト解析を依頼したい」など、技術的なご相談からでも大歓迎です。
※「記事を見た」と書いていただけるとスムーズです。
※技術のご相談は各事例モデルの解析担当者に対応させます。
設計者・エンジニア必読の特設コンテンツ
CAE最適化設計・完全ガイド:高価なツールを「宝の持ち腐れ」にしない!
現場を崩壊させる「手戻り地獄」から抜け出すには?F1から量産車まで、20年以上の知見を誇るGRMが「CAE主導開発」の極意を徹底解説。
設計者・エンジニア必読の特設コンテンツ
CAD/CAE分業の手戻りを解消する「シミュレーション主導設計」実践ガイド
「終わらない手戻り」や「実機と合わないCAE」に疲弊していませんか?最適化アルゴリズムを駆使し、極限の軽量化と工数削減を達成するGRMのアプローチと9つの実践事例を公開!
この記事の監修・執筆チーム
GRM Consulting株式会社 解析エンジニアリング部
モータースポーツ最高峰のF1から量産車開発まで、20年以上にわたり構造設計・衝突・振動・流体解析に携わるスペシャリスト集団。 単なるシミュレーション結果の提示に留まらず、本記事のようなCAE最適化設計を活かした設計を得意とし、製造要件(鋳造・鍛造・押出成形・板金・CFRP)を考慮した「造れる設計」を提案しています。
- 主要ツール:LS-DYNA, Abaqus, Genesis, Nastran, OptiAssist, Simcenter 3D
- 専門領域:構造最適化、衝撃エネルギー吸収体最適化、CFRP複合材解析、衝突解析、CFD解析